Bu yazımızda, adım motorun Arduino ile denetimini 7 adımda inceleyerek, kullanılan parçaların ne işe yaradığını ve uygulama aşamasını ayrıntılı olarak anlatacağız.
Adım 1: Adım (Step) Motor Nedir?

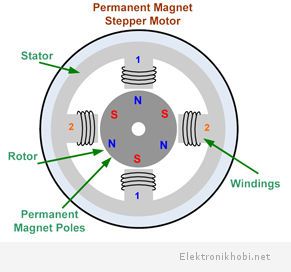
Adım (step) motor, rotor ve stator olmak üzere iki ana parçadan oluşur. Rotor, motorun dönen yani iş yapan kısmıdır. Stator ise rotoru saran, hareketsiz parçadır. Adım motorun rotoru kalıcı mıknatıstan yapılmıştır. Stator ise, içinden akım geçtiğinde elektromıknatıs olan çoklu sargılardan oluşur. Elektromıknatıs sargıları yüklendiğinde, zıt kutupları çekip aynı kutupları iterek, rotoru aynı hizaya getirir. İçinden akım akan sargılar değiştirilerek rotor döndürülür.
Adım motorların birkaç artısı şunlardır:
- Ucuz ve kullanımı kolaydır.
- Motora akım gönderildiğinde rotor yerini sıkıca korur.
- Sınırsızca dönebilir ve kutuplanma değiştirilerek dönme yönü değiştirilebilir.
Adım 2: Malzeme Listesi
|
|
|
|
|
|

|

|




Gerekli malzemeler
- Adım motor
- Arduino
- Yalıtımlı bakır kablo
- Kablo kesici
- Akım düzenleyici
- Transistör
- H köprüsü (bu çalışmada bunu kullanacağız)
- Motor sürücü
İsteğe bağlı
- Havya
- Lehim teli
- Havalandırma aleti (lehimleme yaparken çıkan gazı çekmesi için)
- Üçüncü el aleti
- Koruyucu gözlük
Adım 3: Motor Kablolarını Tutturma
 |
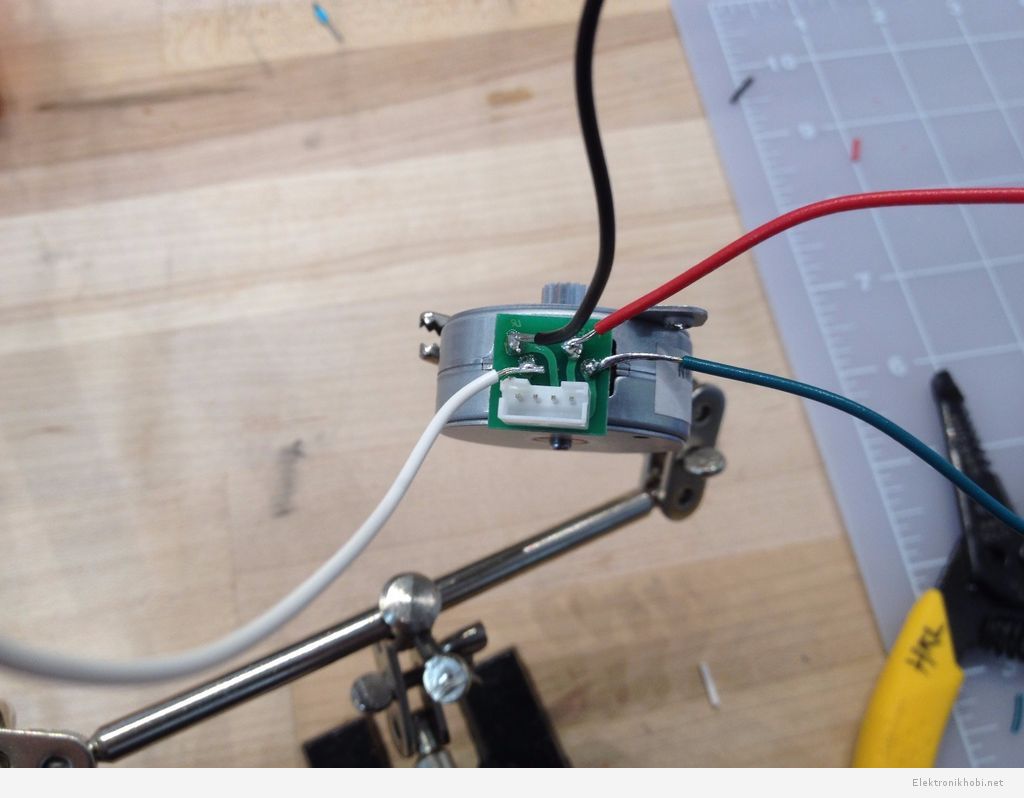 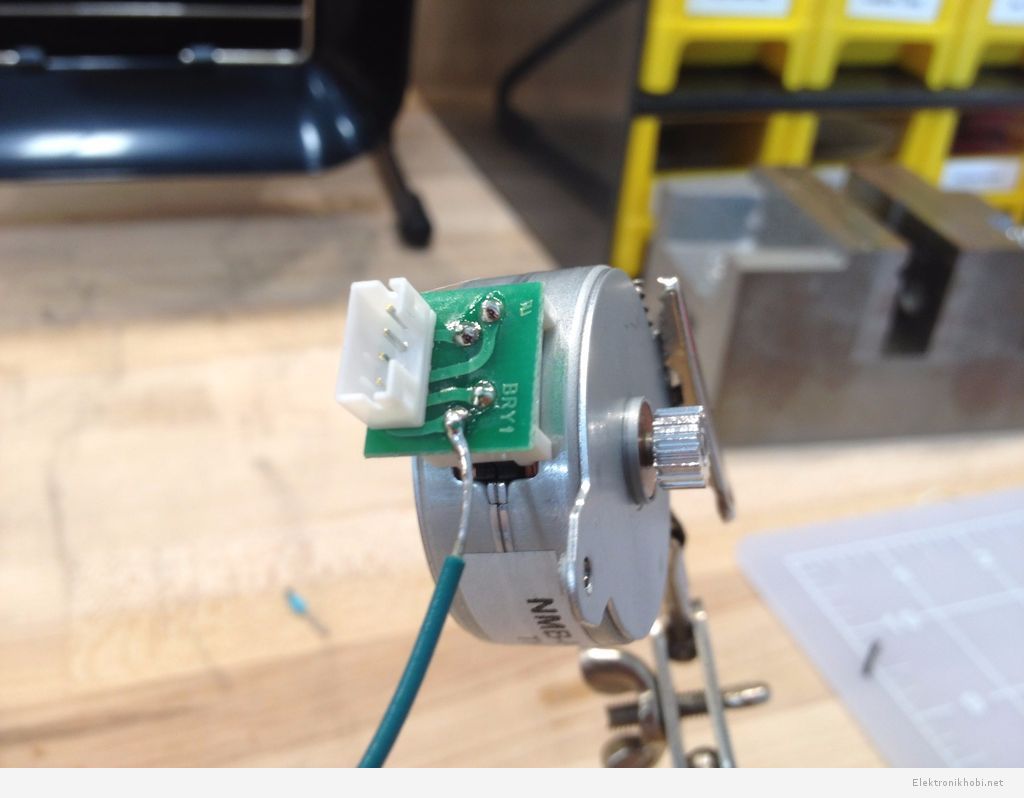 |
Çoğu adım motorun 4 ucu vardır ve renkler herhangi özel bir durumla ilişkili değildir, yalnızca daha kolay ayırt etmeyi sağlar. Bu uçlar hangi sargının etkin olduğunu denetlemek için kullanılacak. Kullanılan motor eski bir yazıcıdan çıkarıldığı için lehimlemek en kolay seçenek olacaktır. Başka bir yöntem de kullanabilirsiniz.
Adım 4: Arduino Programı
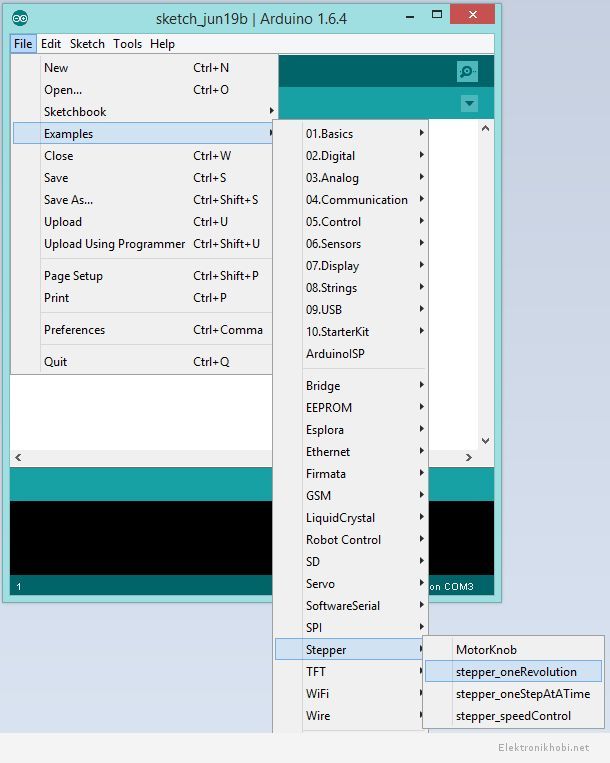
Arduino‘nun kendi kütüphanesinde adım motor için hazır program vardır.Programa “File > Examples > Stepper > stepper_oneRevolution” şeklinde ulaşılabilir.
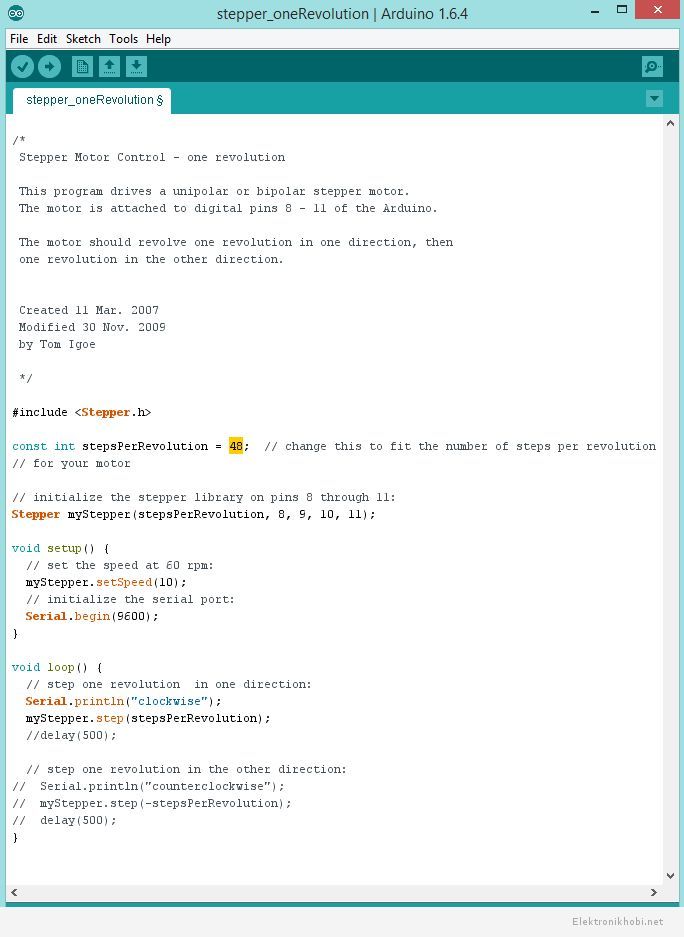
Kendi motorunuza uyarlamak için ise stepsPerRevolution değişkenini değiştirmeniz gerekir. Motorunuzun bir turda kaç adım attığını bu değişkene atamalısınız. Bu programın yaptığı hareketli resimde görüldüğü gibi her bir sargının sinyalini yüksek (high) ve alçak (low) seviye olarak değiştirmektir.
Adım 5: H Köprüsü Nedir?
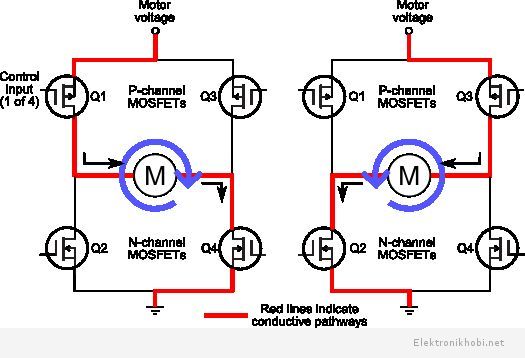
H köprüsü bir DA motorunu ya da adım motoru sürebilecek, 4 anahtarlı bir devredir. Bu anahtarlar röle ya da (çoğunlukla) transistör olabilir. Transistör bir katı hal anahtarıdır (yarıiletken ve hareketli parçası olmayan anahtar) ve bir ucuna gönderilen küçük bir akımla kapanabilir. Motorun yalnızca hızını denetleyebileceğiniz tekli transistörün aksine, H köprüleri motorun yönünü çevirmeyi de sağlar. Bunu farklı anahtarları (transistörleri) açıp, akımın yönünü, dolayısıyla motorun kutuplanmasını değiştirerek yapar. UYARI: Anahtar 1 ve 2 ya da 3 ve 4 asla birbirine bağlanmamalıdır. Bu kısa devreye dolayısıyla cihazın zarar görmesine neden olur.
H köprüsü sürdüğünüz motorun Arduino’yu yakmasını önler. Motorlar indüktörlerdir yani manyetik enerji depolarlar. Motora akım gönderilmediğinde manyetik enerji elektrik enerjisine dönerek devre elemanlarına zarar verir. H köprüsü Arduino’nuzu yalıtmanızı sağlar. Motoru doğrudan Arduino’ya asla bağlamamalısınız.

H köprüleri çok kolay yapılabildiği için, uygunluktan dolayı çok fazla seçenek vardır. Bu çalışmada L293NE/SN754410 entegresi kullanılmıştır. Bacak numaraları ve ne işe yaradıkları aşağıda listelenmiştir.
- Pin 1 (1, 2EN) —> Motor 1 Çalıştır/Durdur (HIGH/LOW)
- Pin 2 (1A) —> Motor 1 Sayısal Uç 1
- Pin 3 (1Y) —> Motor 1 Uç 1
- Pin 4 —> Toprak
- Pin 5 —> Toprak
- Pin 6 (2Y) —> Motor 1 Uç 2
- Pin 7 (2A) —> Motor 1 Sayısal Uç 2
- Pin 8 (VCC2) —> Motor Besleme Ucu
- Pin 9 —> Motor 2 Çalıştır/Durdur (HIGH/LOW)
- Pin 10 —> Motor 2 Sayısal Uç 1
- Pin 11 —> Motor 2 Uç 1
- Pin 12 —> Toprak
- Pin 13 —> Toprak
- Pin 14 —> Motor 2 Uç 2
- Pin 15 —> Motor 2 Sayısal Uç 2
- Pin 16 (VCC1) —> H Köprüsü Besleme Ucu (5V)
Adım 6: Kabloları Bağlama
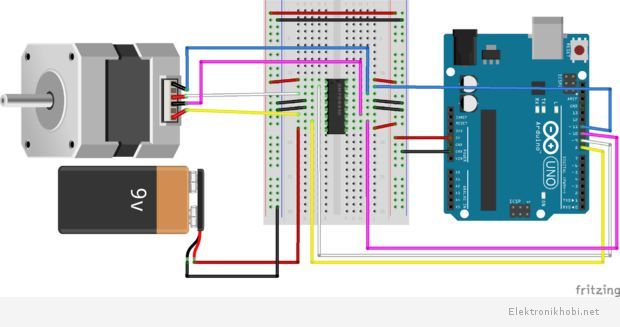
Adım motor için H köprüsündeki 4 uç, motorun uçlarına, 4 sayısal uç da Arduino’ya (bu çalışma için 8, 9, 10, 11) bağlanmalıdır. Şekilde görüldüğü gibi motora harici güç kaynağı bağlanabilir. Bu entegre 4.5 Volttan 36 Volta kadar harici güç kaynağını kaldırabilir.

Adım 7: Programı Yükleme ve Deneme
Programı Arduino’ya yükleyin. Kablolar yanlış uçlara bağlanmışsa motor dönmek yerine titrer. Motor sorunsuz çalışıyorsa hızını ve yönünü istediğiniz gibi ayarlayabilirsiniz.
Artık elinizde istediğiniz gibi sürebileceğiniz bir adım (step) motor var.
Kaynak: http://www.instructables.com/id/Controlling-a-Stepper-Motor-with-an-Arduino/



{kind=link}