Servo motorlar yüksek torklara sahip olması ile bilinirler genellikle 180 derece bir dönüş yaparlar. Fakat içerisinde ki dişlilerde değişiklik yaparak 360 derece döndürmek de mümkündür.
Bu proje ile servo motora 180 derece dönüş vermeyi göreceğiz.
Malzemeler
- 1 adet Servo motor
- 1 adet arduino bordu
Öncelikle servo motoru biraz tanımak gerek.

Burada towerpro firmasının bir servo motorunu görüyorsunuz. Bu motor genellikle helikopterlerde uzaktan kumandalı araçlarda kullanılıyor. 3 adet girişi var bunlar
Siyah= Toprak
Kırmızı= Besleme
Beyaz-Sarı-Turuncu= Sinyal
Bunlar genel olarak kabloların dağılımı fakat kimi zaman bu değişebilir.
Kablo renkleri farklı olsada amaç aynı beslemeler bağlanır. Yalnız burada dikkat edilmesi gereken servonun toprağı ile kullanacağınız mikroişlemcinin toprağının aynı olması gerekir. Olmadığında çalışmıyor.
Servoların içerisinde bir adet potansiyometre bulunur. Bu potansiyometre üzerinde bulunan çarkın konumunu anlamasını sağlar yani servo motorun hangi açılık dönüş yaptığını sürekli takip eder. Bu bir anlamda geri beslemedir. Geri besleme gerilim ile anlık olarak durumu kabul eder.
Servo motorların belli bir sinyal aralığı bulunur. Bir örnek vermek gerekirse 900usn ile 5400usn bu kadar uzunlukta bir sinyal gönderildiğinde 180 derecelik bir dönüşü tamamlar.
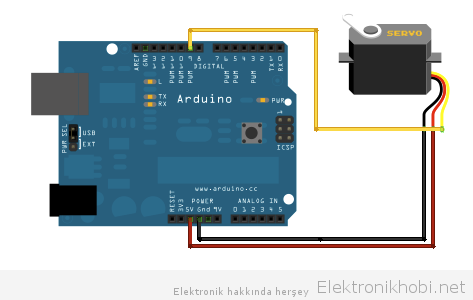
Servo motor ile bağlantısı bu şekilde hangi porttan sinyal gönderecekseniz o port sarı diğerleri ise besleme ve toprağa bağlanır.
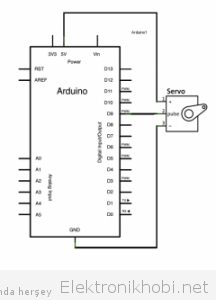
Eğer board üzerinde kurmayacaksanız. Devre şeması bu şekilde
#include
Servo myservo; // Servo fonksiyonu tanımlandı.
int pos = 0; // pozisyonu için değişken
void setup()
{
myservo.attach(9); //pin 9 a baglanti
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // 0dan 180 dereceye gidiyor
{ // adımlar 1 derece
myservo.write(pos); // pos değişkeni ile pozisyonu bildiriyor.
delay(15); // yeni pozisyon için 15ms bekleme
}
for(pos = 180; pos>=1; pos−=1) // 180 dereceden sıfır dereceye gidiyor.
{
myservo.write(pos); // Pozisyonu yazdırıyoruz
delay(15); // 15ms gecikme
}
}
Kodumuz



{kind=link}
[…] Arduino ile servo motor kontrolü konusunda biraz servo motorlardan bahsetmiştim. […]