Uzun zamandır aklımda olan bir proje de denge robotu yapmak. Daha önce basit bir modelini yapmış olduğum bir denge robotu var. Ama bu sefer daha profesyonel bir şey yapmak istiyorum. Bu konuda bir hayli araştırma yaptım. Araştırma yaptığım birkaç site:
1- instructables.com : Özellikle bu site bizler için tam bir hazine.
2- Kickstarter.com: Bu sitede yeni ve özgün projeler bulunabiliyor. Özellikle open source (açık kaynak) olanlara bakmak lazım. Yapan eleman herşeyini paylaşıyor bu pojelerde.
3- Thingverse.com : Burada daha çok 3d yazıcı, tarayıcı, cnc router gibi cihazların yapım şemaları var.
Bu 3 site benim vazgeçilmezlerim arasında. İnterneti bunlar için kullanıyorum diyebilirim. Birkaç proje üzerinde durdum.
Bölüm 1: Araştırma yapmak.
Öğrencilerine en çok sıkıntı çektiği noktalardan birisi araştırma yapamamak. Bu yazımda yaptığım araştırmaları da ekliyorum. 5 tane alternatif ekleyeceğim. Ama internette sayısız denge robotu projesi de olduğunu söyleyim.
1- Araştırmalarım sonucunda Kickstarter.com üzerinde yayınlamış olan Balanduino denge robotu üzerinde durdum. Proje tamamen açık kaynak. Yani kodu, şeması vs.. herşeyi sitede paylaşılmış.
Proje bu: https://www.kickstarter.com/projects/tkjelectronics/balanduino-balancing-robot-kit/description
Github sayfasında her şey paylaşılmış: https://github.com/TKJElectronics/Balanduino
Balanduino denilen bir elektronik kart üzerinden tüm kontrol sağlanıyor. Bu kartın şemaları da github sayfasında var.
Açıkçası benim aradığım denge robotu projesi daha basit birşey olmalı. Üzerinde günler harcamak istemiyorum. Çünkü çok kısıtlı bir zamanım var.
2- Daha basit ve arduino ile yapılmış denge robotu projesi de şu:
Github sayfası: https://github.com/kurimawxx00/arduino-self-balancing-robot
Altta bulunan videoya baktığımda pek beğenmedim açıkçası. Çok basit. Özellikle her yerde uzuca satılan tekerlek sistemi elimde olmasına karşılık pek de beğendiğim bir sistem değil. Bu yüzden aramaya devam ediyorum.
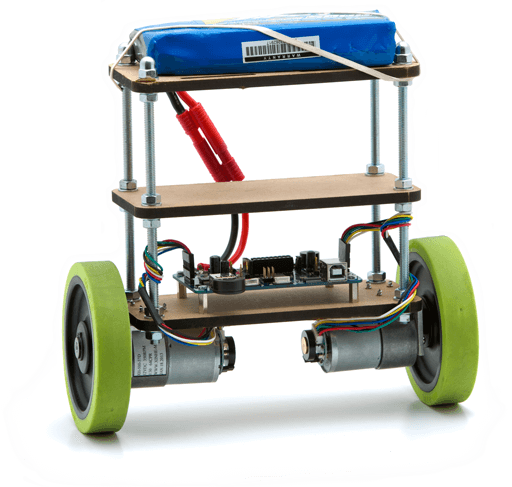
3- Tam istediğim gibi bir denge robotunu şurada buldum:
https://www.instructables.com/id/Arduino-Self-Balancing-Robot-1/
Üstelik 9 kişi daha önce bu projeyi yapmış. Demek ki çalıştığı kanıtlanmış bir proje. Üzerinde bulunan ultrasonik sensör ile engel algılatma olayı da çok iyi fikir. Taş zeminde bile dengede kalması kodlanmasının ne kadar iyi olduğunun kanıtı. Kodlamada PID algoritması kullanılmış. PID ile çok sağlam projeler yapılabiliyor. Ama PID bana her zaman zor gelmiştir.
Bu proje şimdiye kadar gördüklerim arasında
, aklımdaki fikre en yakın proje diyebilirim. Biraz daha araştıralım.
Buna benzer bir proje de şu:
https://www.instructables.com/id/Self-Balancing-Robot/
Birçok güzel denge robotu projesinde DC motor ve encoder kullanılmış.
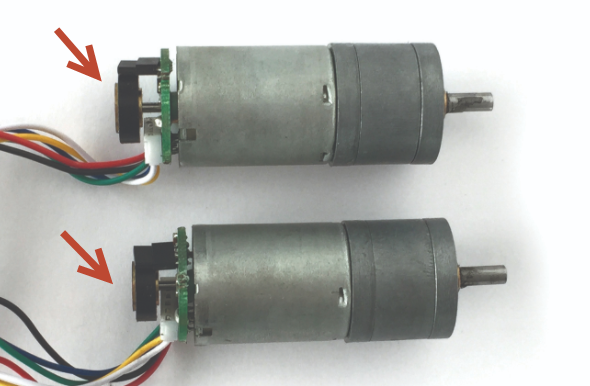
Encoder ile DC motorun hızı ölçülüyor ve ona göre denge sağlanıyor. Encoder kullanmak yerine step motor kullanmayı tercih ederim. Bu yüzden ya encodersiz projelere odaklanacağım ya da step motor kullanılan projelere.
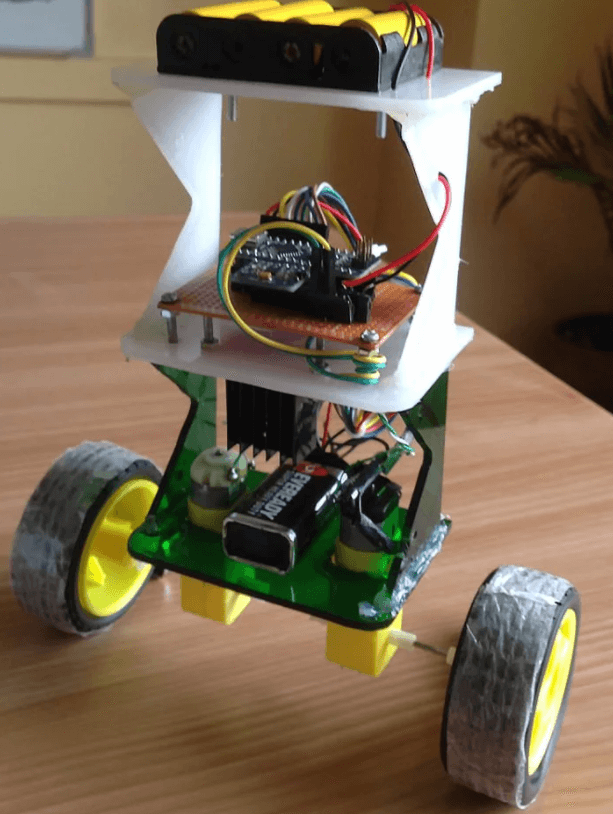
4- Aradığım robota giderek yaklaştığımı hissediyorum. Denge robotunu joistikle uzaktan kumanda etme fikrine ne dersiniz? InstaBots denilen bir denge robotu var. Sitesi şu:
InstaBots Self-Balancing Robot v2
Nasıl yapılıyormuş diye araştırırken yine tanıdık bir siteye denk geldim:
https://www.instructables.com/id/InstaBots-Upright-Rover/
Gördüğüm kadarıyla hiç bir özel malzeme kullanılmamış. Tamamen her yerde bulunan malzemelerden yapılmış.
Şimdiye kadar gördüğüm projeler arasında bana en uygunu sanırım bu. Biraz daha araştırmaya devam edelim. 🙂 Güzel şeyler çıkıyor.
5- Galileo geliştirme borduyla yapılmış şöyle bir denge robotu projesi de buldum ama bana pek hitap etmedi açıkçası. Zaten elimde de Galileo yok.
http://wired.chillibasket.com/wp-content/uploads/2014/08/Balancing-Robot-Documentation-3.pdf
Bölüm 2: Haydi biraz çalışalım.
Ben 4. denge robotu projesini yapmaya karar verdim. Siteden projeyi pdf olarak indirdim. PDF’i şuraya yükledim. İndirebilirsiniz: https://yadi.sk/i/T-2ToOW93ToNfh
Benim seçtiğim alternatif oldukça masraflı ve zor olabilir. Bütçe sorunu olanlar için daha basit olan 2. seçeneği tavsiye ediyorum.
Elimde bu malzemelerin çoğu var. Neler lazım bir bakalım:
3x Potansiyometre 2x UNO R3 Arduino 2x USB Kablo 2x Sensor Shield 2x 24L01 : Wi-fi modül. Bu yok bende. Bunun yerine başka birşey kullanamaya çalışacağım. 2x Joystick 2x Gear Motor: Redüktörlü motor (dişli sistemli) 2x Tekerlek 2x Motor tutucu 2x kaplin ?? 1x T-Plug ?? 1x 9V pil yuvası 1x MPU6050 Gyro sensörü 1x L298N motor sürücü 1x Denge Robotu Platformu. (Ben bunu dakota ile yapmayı düşünüyorum.) 1x kablosuz uzaktan kontrol platformu 1x Kutu &kablolar& konnektörler
Malzeme listesi yukarıda. Size önerim malzemeleri temin etmeye başlamadan önce projeyi tamamen anlamanız. Aksi takdirde hem zaman hem de para israfı yapmış olursunuz.
Bir önerim de projeyi uygulamaya başlamadan önce malzemeleri kullanmayı öğrenmeye çalışın. Örneğin; L293N sürücüsü ile 1 motoru arduino kullanarak çalıştırmakla başlayabilirsiniz. Diğer sensörlerle de örnek ve temel uygulamalar yaparsanız, hem daha iyi bir öğrenme sağlarsınız hem de projede sorun çıkarsa çözmek için daha fazla şansınız olur.
Devam edecek…..




{kind=link}