Genelde Engel algılayan robot yapımında pic gibi bir mikrodenetleyici kullanılır. Mikrodenetleyiciyi programlamak bir çok arkadaşa zor gelir. Bu projede mikrodenetleyicilerle uğraşmadan engel algılayan robot yapımını anlatacağız.
Engel algılayan robot nedir?
Temelde, potansiyel engelleri algılayabilen bir araç. Hareket eder ve engelle karşılaştığında yön değiştirir. İşlem tamamen otomatiktir yani insan kontrolü vs.. yoktur.
Mikrodenetleyici olmadığını söylemiştim. Herhangi bir motor sürücüsü gibi bir entegre de kullanılmıyor. Bu yüzden eksta basit bir engel algıma robotu ile karşı karşıyayız. Lise düzeyinde veya üniversite başlangıç düzeyindeki arkadaşlara ve temel düzeyde elektronikhobi’ciler için uygun bir proje.
Aşağıdaki elektronik şemada sistemin modüllerinden birisi gösteriliyor. Bu devrelerden iki tanesi, sol-sağ motorlardan her birini çalıştırmak için kullanılıyor. Fikir basit aslında. Devrede her hangi güçte bir dc motor kullanabilirsiniz. (Aşağıdaki devrede oklarla gösterilen kısımların nasıl bağlanacağını diğer şekle bakarak daha kolay anlayabilirsiniz.)
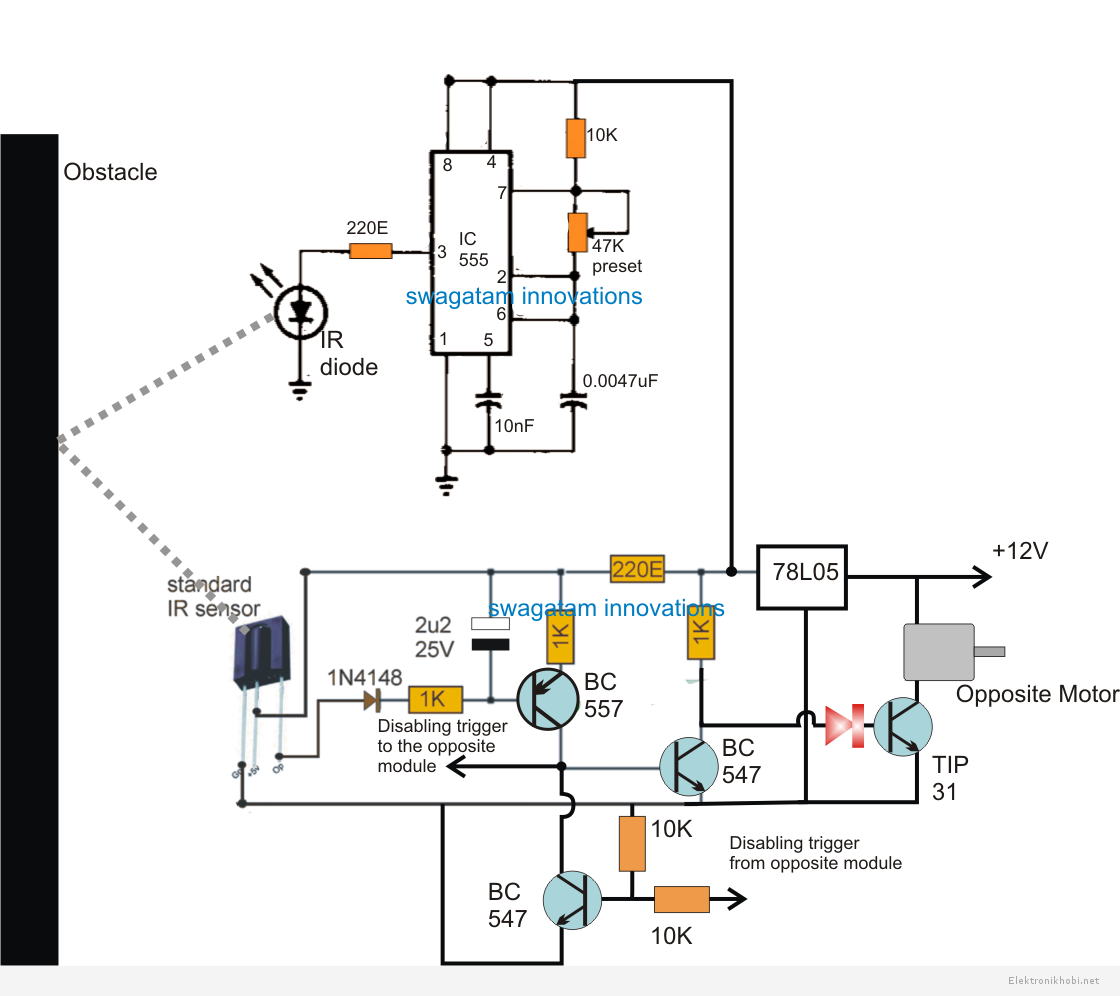
Şimdi yukarıdaki devreyi biraz açıklayalım:
555 entegresi bir IR transmitter olarak kullanılıyor ve 38kHz frekansında kızıl ötesi ışık yayılmasında kullanılıyor. Transistörlü devre ise alıcı katı olarak kullanılıyor. Örneğin sağ modülü ele alalım. Bu modülün yol üstündeki engeli ilk olarak farkettiğini düşünelim.
Engel farkedilir farkedilmez 555 entegresi tarafından üretilen 38kHz sinyal engelden yansıyarak alıcı devresine ulaşır. Alıcı devresi sinyalı algıladığında, bağlı olduğu transistör iletime geçer.
Bu transistör tarafından kontrol edilen motor (aracın sol tarfındaki) sağdaki modül tarafından kontrol ediliyor. Aynı şekilde diğer modül de..
Bir motor aktif olduğunda diğer motor aktif halde olamaz.
Engellin sol taraf tarafından engel algılandığını düşünürsek, sağ motor hemen durur ve sol motor çalışır. Bu şekilde araç engelden kaçar.
Sensör olarak standart TSOP17XX serisi kullanılabilir.
Motorlar dişli sistemli motor olursa, kontrol kabiliyeti daha iyi olur.
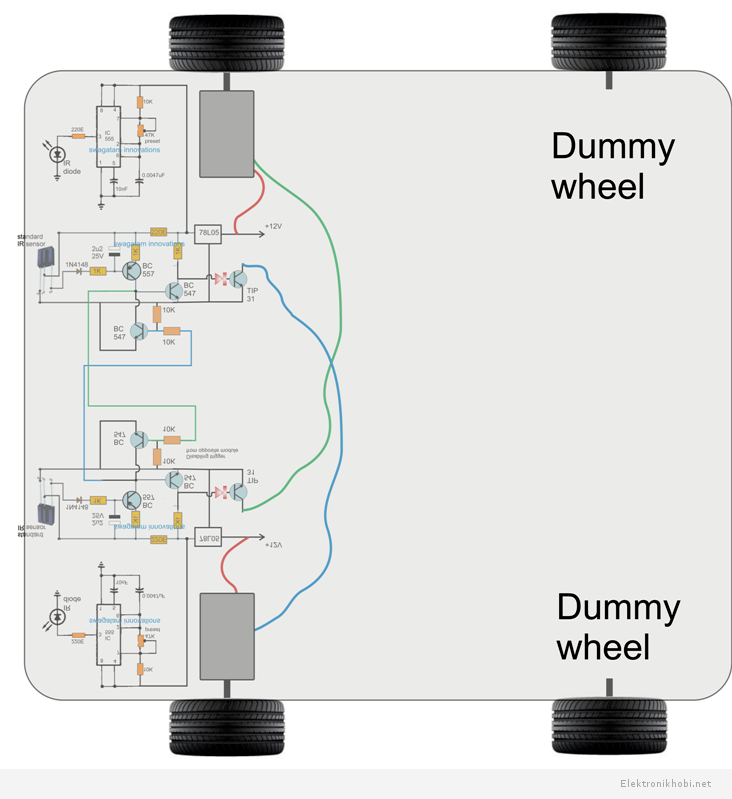
Sol ve sağ modüllerin birbirine bağlanışı aşağıdaki gibi olmalıdır:
Ek bilgiler:
Transistör nedir? Nasıl Kullanılır?



{kind=link}
Arkadaşlar körler için engel çıktığında öten haber veren bir devre yapmak istiyorum..ortaokul düzeyinde … nasıl bir devre yapabilirim.