Elektroniğe gönül vermiş herkesin bir dönem yaptığı,yapmaya çalıştığı yada en azından bir kez yapmayı düşündüğü çizgi izleyen robot projesini bilinenin aksine farklı bir yolla yapmayı anlatacağım.
Evet hepimizin bildiği gibi ülkemizde de üniversiteler tarafından düzenlenen yarışmaları olan çizgi izleyen robotlar genellikle microdenetleyiciler kullanılarak yapılmaktadır.Bu da pic konusunda tecrübesi olmayan arkadaşlar için bir sorun olmakta.İşte bu projenin de asıl amacı hem bu soruna çözüm sağlamak hem de bir projeye farklı bir bakış açısıyla bakarak nasıl yapabilirim farkındalığı oluşturabilmektir.
Projeye değinecek olursak kuracağımız devrede başta da bahsettiğim gibi hiçbir mikrodenetleyici kullanmadan 555 timer merkezli olacak.3 tane 555 tamer kullanacağız.Robotumuz çok gelişmiş bir model olmasada her türlü kavisi izleme yeteneğine sahip.Maliyet açısından da oldukça uygun.Bunun yanısıra projemiz robot projesi olduğu için elektronik becerinin yanında birazcık mekanik beceride gerektiriyor.
Kullanılan malzemeler;
- 1k x (4)
- 4.7K
- 180ohm
- Potansiometre 10k x (2)
- 10uF x (3)
- LDR x (2)
- Parlak Beyaz LEDs x (2)
- n4148 Diod
- BD3904 Transistor x(2)
- 555 Timers x (3)
- DC Dişli Motor (2)
- 9v Pil
Kişisel tavsiyem ve burda da kullanılan motorlar dişli DC motorlar;çünkü dişler, kuvveti farklı hız, tork ve/veya doğrultuda aktarabilir.Robotun tüm ağırlığının taşınabilmesi için torkun yüksek olması gerekli (N20 Tip Motor kullanabilirsiniz).Ayrıca rpm yüksekse sensörlerin siyahla beyaz renkleri algılma ve motoru açma-kapama süresi daha kısa olmalıdır.Tavsiyem yüksek rpmli (1000 rpm gibi) motorlar almayın 60-70 rpm işiniz görecektir.Bu sebeplerden ötürü dc motorunuzu alırken internetten teknik (RPM,Tork) özelliklerine bakmanızı şiddetle öneririm.
Devre Diyagramı;
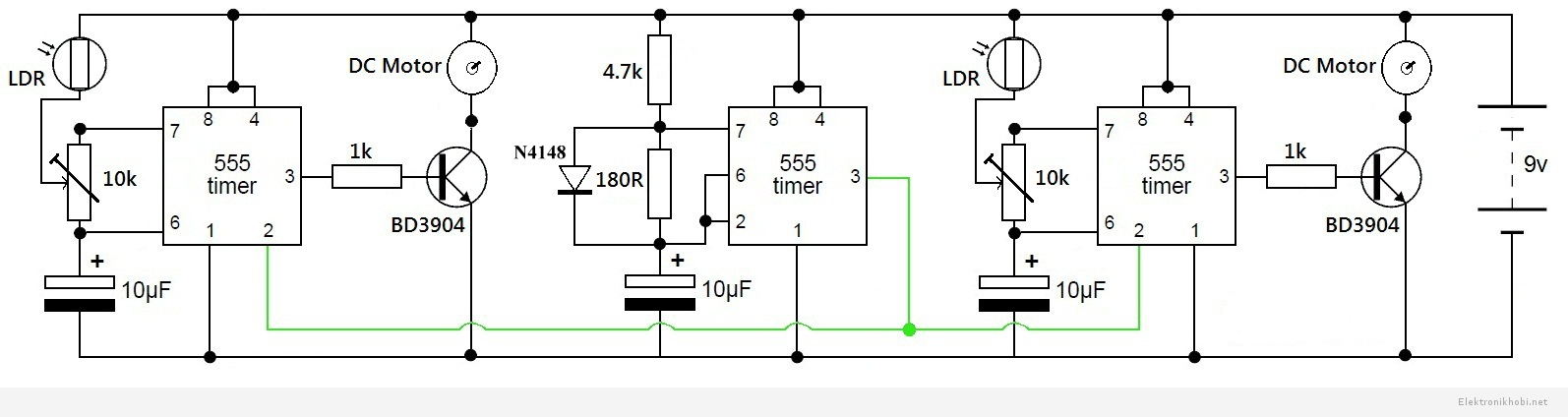
İlk bakışta karısık gibi görünsede oldukça basit bir devre.Eğer dikkat ederseniz merkezdeki 555 timerın dısında kalan diğer 555’lerin her ikiside tamamen aynı! Motorlar doğrudan 555 Timer çıkışlarına bağlı değil arada transistör var ve transistör anahtar olarak kullanılmakta.Transistörün pin yapılandırması sırasıyla ;(1) Emiter, (2)Beyz & (3) Kollektör.Ledler bağlantıda gösterilmemiş 2 ledde doğrudan sağ ve sol hareket için 1K direnç üzerinden aküye bağlı olacak.
Sensör:Robotumuz için en önemli bölüm sensörlerdir;çünkü sensör robotumuz için adeta bir göz görevi görüp motorun çalışıp çalışmamasını sağlamaktadır.
Bu bölümde ledler herzaman yanar durumda.Ledin yansıması LDR tarafından algılanır ve hareket buna göre belirlenir.Led siyah bölgede ise LDR’ ye yansımaz ve motor çalısır.Aksi durumda yani led beyaz bölgedeyken LDR’ye yansır ve motor durur.
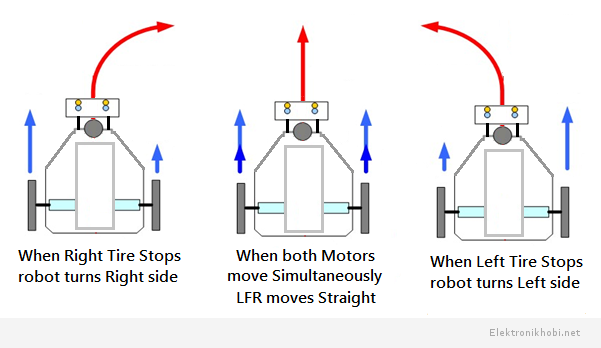
Hareket Prensibi;
Sensörlerle(LDR) motor bağlantıları çapraz yapılmıştır.Yani sağdaki sensör sol motoru,soldaki sensörde sağ motoru kontrol etmektedir;çünkü robot sağa döneceği zaman sol motorun sola döneceği zaman da sağ motorun çalışması gerekir
Devrede dişli motorlar kullanıldı;çünkü sıradan motorlar bütün yükü kaldıracak torka sahip değiller!
NOT:YAPTIĞIMIZ ÇİZGİ İZLEYEN ROBOT SİYAH ZEMİN ÜZERİNDE BEYAZ ÇİZGİ İZLEMEKTEDİR.




{kind=link}
merhaba beyaz üstüne siyah çizgi olarak nasıl değiştirebiliriz devreyi ?