Joystick ler aslında basit olarak iki adet potansiyometreden meydana gelmektedir. Joystick modülleri arduino ile beraber kolayca kullanılabilir ve çeşitli projeler geliştirilebilir. Joystick modülü ile robot kollar, kumandalı araçlar v.b. kontrol edilebilir. Bu projede joystick modülünü kullanarak servo motor kontrolü yapacağız. Bu proje aslında robot kol kontrolünün de temelini oluşturmaktadır.
Kullanılacak Malzemeler:
Arduino
2 eksenli XY joystick modülü
Servo motor


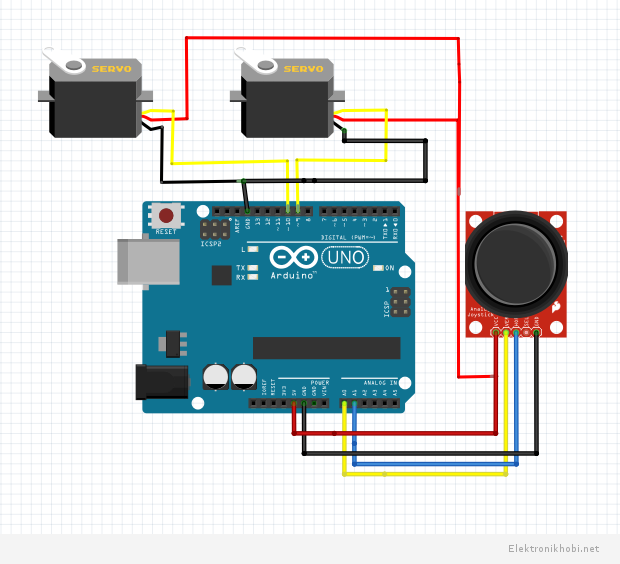
Joystick modülünü arduinoya ya kolayca bağlayabiliriz. Joystick deki +5V ve GND arduino da aynı yerlere bağlanmalıdır. VRx ve VRy pinleri X ve Y eksenlerindeki 2 adet potansiyometredir. Potansiyometreler analog giriş olcağı için arduino nun analog input pinlerine bağlanmalıdır. Joystick deki SW pini ise digital bir pindir ve joystick e basılıp basılmadığı bilgisini saklar. Bu uygulamada bu pini kullanmayacağız.
Bu uygulamada 2 adet servo motoru kontrol edeceğiz. Servo motorlardan biri joystick in x eksenindeki hareketi ile, diğeri ise y eksenindeki hareketi ile 0-180 derece arası dönecektir.
Aşağıda uygulamamızın devre şeması ve arduino kodları verilmektedir.

#include <Servo.h> // Servo kütüphanesi
Servo myservo1; // 2 adet servo motor kullanıldı
Servo myservo2;
int pozisyon_x=0; // Joystick lerden okunan analog değerler bu değişkenlerde tutulacak
int pozisyon_y=0;
const int x_pin=0; // Joystick in x ve y eksenleri 0 ve 1. pinlere bağlanacak
const int y_pin=1;
void setup() {
myservo1.attach(9); // Servolar arduinonun 9 ve 10. pinlerine bağlanacak
myservo2.attach(10);
Serial.begin(9600); // Seri haberleşme başladı
}
void loop() {
pozisyon_x = analogRead(x_pin); //0. pinden analog veri okundu
pozisyon_x = map(pozisyon_x, 0, 1023, 0, 180); //0-1023 değeri 0-180 değerine çekildi
myservo1.write(pozisyon_x); // Elde edilen 0-180 arası açı değeri servoya gönderildi
delay(15); // Servonun uygun konuma gelmesi için kısa bir gecikme
pozisyon_y = analogRead(y_pin); //1. pinden analog veri okundu
pozisyon_y = map(pozisyon_y, 0, 1023, 0, 180); //0-1023 değeri 0-180 değerine çekildi
myservo2.write(pozisyon_y); // Elde edilen 0-180 arası açı değeri servoya gönderildi
delay(15); // Servonun uygun konuma gelmesi için kısa bir gecikme
Serial.print("Servo 1: ");
Serial.print(analogRead(pozisyon_x)); // Servoların kaçar derece döndükleri seri monitörde görüntülenecek
Serial.print("\n"); // Alt satır
Serial.print("Servo 2: ");
Serial.print(analogRead(pozisyon_x));
Serial.print("\n");
delay(1000);
}
Kaynak : http://www.instructables.com/id/Arduino-2-Servos-Thumbstick-joystick/



{kind=link}
Uygulama çok kolay hemen çalıştı
Bu arada kodda pozisyon_y değeri yerine iki kez x değeri yazdırılmış