Sensörler her ölçme sisteminin önemli organlarıdır. Sensörler çevreden bilgi toplarlar ve sistemlere giriş olarak elektrik sinyali sağlarlar.Farklı çalışma prensiplerinde çalışan ve farklı uygulamalarda kullanılan sensörler arasında, konum sensörleri farklı sistemlerde önemli bir rol oynar.
Sistem; kontrollü uçuş sistemi, elektronik kontrollü sürüş sistemi, yuvarlak eğriler alan hızlı trenler , enjeksiyon kalıplama makineleri, paketleme makineleri,vs olsa da konum sensörleri farklı yollarla uygulamalarını bulur.
Posizyon Sensörleri Nelerdir?
Sensörlerin geniş spektrumunu sınıflandırmanın en yaygın yolu, sensörlerin özel kullanım alanına dayanır. Nemlilik ölçmek için kullanılan sensör nemlilik sensörü olarak adlandırılır, basınç ölçmek için kullanılan sensör basınç sensörü, sıvı seviyesini ölçmek için kullanılan sensör seviye sensörü olarak adlandırılır ve buna benzer bütün sensörler aynı algılama prensibini kullanabilir. Benzer şekilde pozisyon ölçmek için kullanılan sensör pozisyon sensörü olarak adlandırılır.
Pozisyon sensörleri temel olarak referans konumundan başlayarak cisim tarafından gidilen uzaklığı ölçmek için kullanılılan sensörlerdir.Cismin referans ya da başlama konumundan ne kadar uzağa hareket ettiği pozisyon sensörü tarafından algılanır ve genellikle sonuç uygun harekete geçen bir geriş dönüş olarak kontrol sistemine verilir.Cismin hareketi pozisyon sensörünün doğrusal pozisyon sensörleri ya da açısal pozisyon sensörleri olarak adlandırılmasına göre doğrusal ya da eğrisel olabilir.
Pozisyon Sensörü Çeşitleri
Pozisyon sensörleri 1 cismin yerdeğiştirmesini ölçmek için farklı algılama prensipleri kullanır.Poziyon sensörü için kullanılan farklı algılama prensiplerine bağlı olarak sensörler aşağıda görüldüğü gibi sınıflandırılabilir:
1)Direnç Temelli ya da Potansiyometrik Pozisyon Sensörü
2)Kapasitif Pozisyon Sensörü
3)Manyetostriktif Doğrusal Pozisyon Sensörü
4)Girdap Akımı Temelli Pozisyon Sensörü
5)Hall Etkili Manyetik Pozisyon Sensörleri
6)Optik Pozisyon Sensörü
7)Sensör Seçimi
Potansiyometrik Pozisyon Sensörü
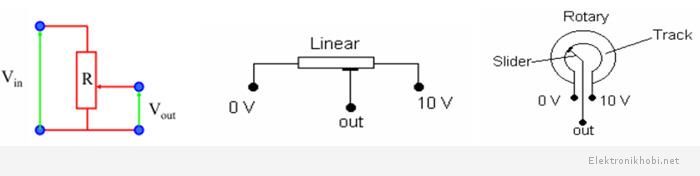
Potansiyometrik pozisyon sensörü direnç etkisini algılama prensibi olarak kullanır. Algılama elamanı sabit bir direnç(ya da iletken) parçadır. Bir silecek uzaklığı ölçülecek olan cisme ya da cismin bir parçasına eklenir. Silecek ,parça ile temas halindedir. Silecek hareket ettikçe, parçanın bir ucu ve silecek arasındaki direnç değişir. Bu nedenle direnç silecek pozisyonunun bir fonksiyonu olur. Dirençteki birim başına değişme silecek pozisyonunda da doğrusal bir değişimdir.
Direnç ,silecek konumuna orantılı direnç gerilim bölücü düzenlemesi kullanılarak ölçülür. Parçanın uçlarına uygulanan sabit voltaj ve silecek ve parçanın bir ucu arasındaki direnç üzerindeki gerilim ölçülür. Bu nedenle, silecek ve parçanın bir ucu üzerindeki çıkış gerilimi silecek pozisyonuyla orantılıdır.
İletken parça gereksinimlere bağlı olarak doğrusal ya da açısal yapılabilir. Parça karbon, dirençli tel ya da piezo dielektrik malzemeden yapılır.
Potansiyometreler hakkında ayrıntılı bilgiyi şu yazımızda paylaşmıştık: Dosya konusu : Potansiyometreler
2)Kapasitif Pozisyon Sensörleri
Herhangi iki plaka arasındaki kapasitans, plakalar arasındaki dielektrik geçirgenliğe, plakalar arasında örtüşen alan ve iki plaka arasındaki uzaklığa bağlıdır. Kapasitif bir sensör oluşturmak için bu üç parametreden herbiri değişebilir.
Kapasitif pozisyon sensörleri bu 2 yapıyı takip edebilir:
1)Dielektrik sabitini değiştirerek
Bu yapıda, uzaklığı ölçülecek olan cisim ya da onun parçası plakalar arasındaki dielektrik maddeye bağlanır. Cisim hareket ederken, 2 plaka arasındaki etkili dielektrik sabiti,dielektrik malzemeye bağlı olarak hava ve dielektrik sabitinden dolayı dielektrik sabitinin bir sonucudur. Dielektrik sabitini değiştirerek plakaların arasındaki kapasitansın değişmesine neden olur. Bu nedenle kapasitans cisim konumunun bir sonucu olur.
Bu ilke genellikle 2 eş merkezli tüpün ve sıvıların dielektrik gibi rol oynadığı seviye pozisyon sensörlerinde kullanılır.
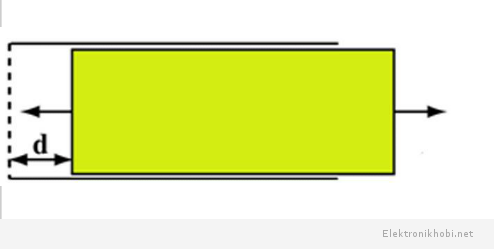
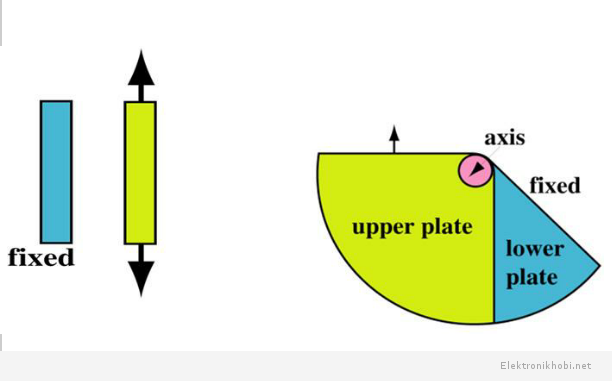
2)Örtüşen Alanları Değiştirerek
Bu yapıda uzaklığı ölçülecek olan cisim ya da onun parçası plakalardan birine bağlanır, diğer plaka sabit kalır.
Cismin hareket etmesiyle birlikte, plakalar arasındaki örtüşen alan değişir. Plakalar arasındaki örtüşen alanın değişmesi, plakalar arasındaki kapasitansın değişmesine neden olur. Bu nedenle, kapasitans cismin pozisyonunun bir fonksiyonu olur. Bu ilke hem doğrusal hem de açısal hareketler için kullanılır.
2) Doğrusal Değişken Fark Transformatörü
Doğrusal değişken fark transformatörü genellikle kısaltması ile LVDT bilinir.LVDT bir nesnenin doğrusal hareketini ona karşılık gelen 1 elektrik sinyaline dönüştüen 1 elektromekanik dönüştürücüdür.Mikrodan birkaç inche kadar değişen hareketleri ölçer.
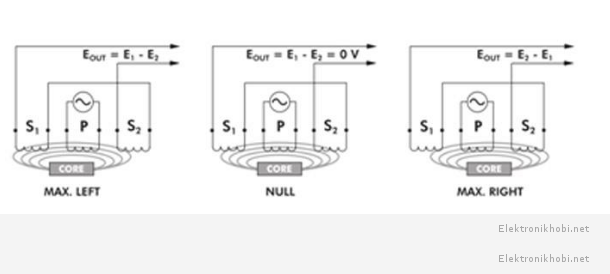
LVDT birincil sarım ve bir çift ikincil sarımdan oluşur. Birincil sarım, ikincil sarımlar arasında sıkıştırılmıştır. İkincil sarımlar birincil sarım üstünde simetrik olarak ayrılmış özdeş olarak eşit sarılmıştır.Bobinler polimerle sağlamlaştırılmış içi boş cama sarılmıştır ve daha sonra silindirik paslanmaz çelikle güvenceye alınmıştır. Sarımlar sensörlerin sabit parçasıdır.
Doğrusal değişken fark transformatörünün hareketli elemanı çekirdek olarak adlandırılır ve çekirdek geçirgenliği oldukça yüksek olan manyetik malzemeden yapılmıştır. Çekirdek bobinin içi boş oyuğunda serbestçe eksensel olarak hareket eder.Çekirdek yerdeğiştirmesi ölçülecek olan nesneye mekanik olarak bağlanır.

Doğrusal değişken fark transformatörünün birincil sarımı uygun genlik ve frekansın akımı değiştirilerek enerjilendirildiğinde,ikincil sarımdaki AC voltaj indüklenir.LVDT’nin çıkışı iki ikincil sarım arasındaki voltaj farkıdır. Fark voltajı çekirdeğin konumuna göre değişir. Genellikle AC çıkış fark voltajı ölçme sistemlerinde kullanmak için DC voltaja dönüştürülür.
Birincil sarım uyarıldığında , ikincil sarımlardaki indüklenen voltaj,manyetik akı kuplajına bağlıdır. Çekirdek merkezdeyken, ikincil sarımlara eşit akı bağlanmıştır, bu nedenle fark voltajı sonucu sıfırdır. Bununla birlikte, çekirdek merkezde değilken ikincil sarımlardaki eşit olmayan akı indüklenir. Böylece, iki sarım arasındaki voltaj çekirdeğin konumuna bağlıdır.
Doğrusal Değişken Fark Transformatörleri çeşitli avantajlara sahiptir; çok yüksek çözünürlük, sınırsız mekanik ömür, yüksek güvenilirlik, çapraz duyarlılık(gürültü ve parazitlere karşı az duyarlılık) ,çevresel olarak dayanıklılık,vs.
Açısal hareketleri ölçmek için, LVDT’nin 1 değişiği olan döner değişken fark transformatörü(RVDT) kullanılır. RVDT işleyişi bakımından LVDT ile kesinlikle aynıdır, fark yapılarındadır.
3)Manyetostriktif Doğrusal Pozisyon Sensörleri
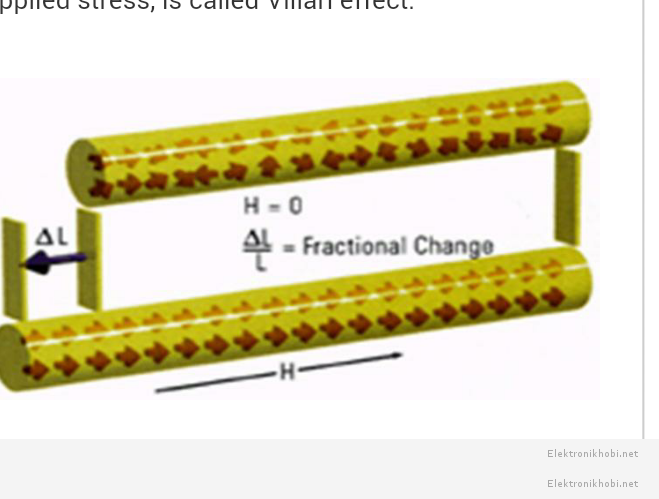
Manyetostriksiyon,manyetik alanın hizalanmasından oluşan manyetik alanın varlığında,malzemenin boyutunda ya da şeklindeki değişmeye etkiyi ifade eder.Bu özeliklere sahip olan malzemeler ferromanyetik malzemelerdir.Örneğin; demir, nikel ve kobalt. Ters etki olarak,yani uygulanan baskıdan(gerilimden) dolayı manyetik özelliklerin değişmez özelliği Villari Etkisi olarak adlandırılır.
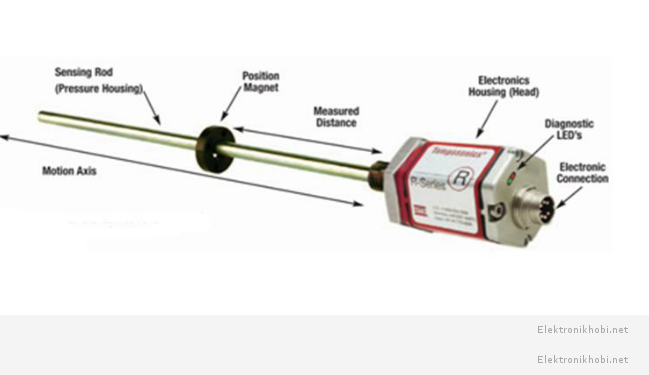
Bu sensörler 5 bileşenden oluşur, yani ;pozisyon magneti, dalga kılavuzu, pikap, nem ve elektronik modül.Bir manyetostriktif pozisyon sensörü, bir pozisyon magneti ve algılayıcı çubuğun baş kısmı arasındaki uzaklığı ölçer.Algılayıcı çubuk hareketi ölçülecek eksene monte edilir.Halka şeklindeki pozisyon magneti hareket edecek parçaya bağlanır ve algılayıcı çubuk boyunca hareket eder.
Elektronik modülden bir sorgu(ya da akım) sinyali gönderilir.Pozsiyon magnetinin konumunda manyetik alan, magnetteki manyetik alan ile etkileşen akım sinyali tarafından üretilir.Üretimin sonucu sonik dalga ya da torsiyonal gerilim dalgasıdır.Gerilim dalgası nemlendirme modülü tarafından uzaklaştırılır.

Sorgu sinyalinin üretilmesi ve sinyalin varması pozisyon magnetinin yerini belirtir.
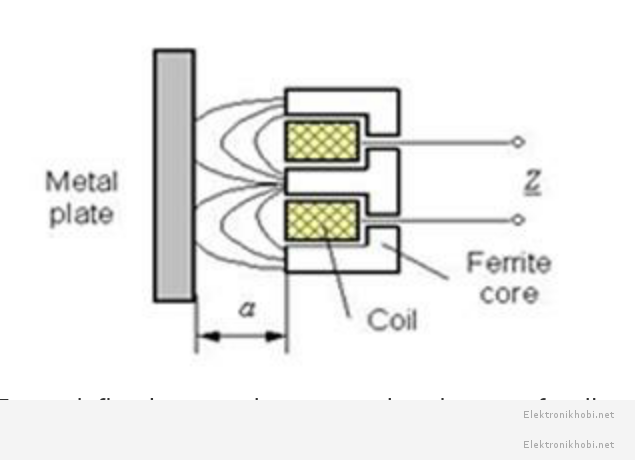
4)Girdap Akımı Temelli Pozisyon Sensörü
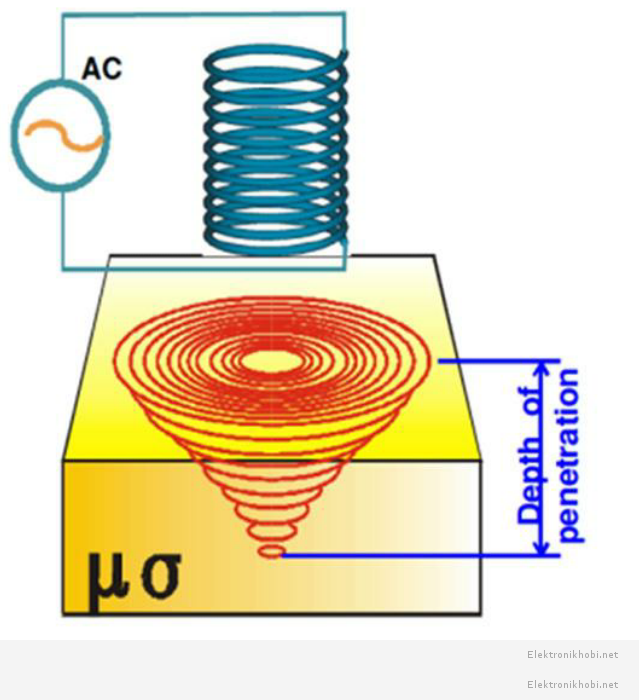
Girdap akımları düzlemlerde dolaşan manyetik alana dik olan indüklenmiş akımın kapalı döngüsüdür. Girdap akımları normalde bobinin sarımlarına paralel olarak hareket eder ve indükleyici manyetik alana akış sınırlandırılmıştır.
Girdap akımlı sensörlerin çalışma prensibi şöyledir:
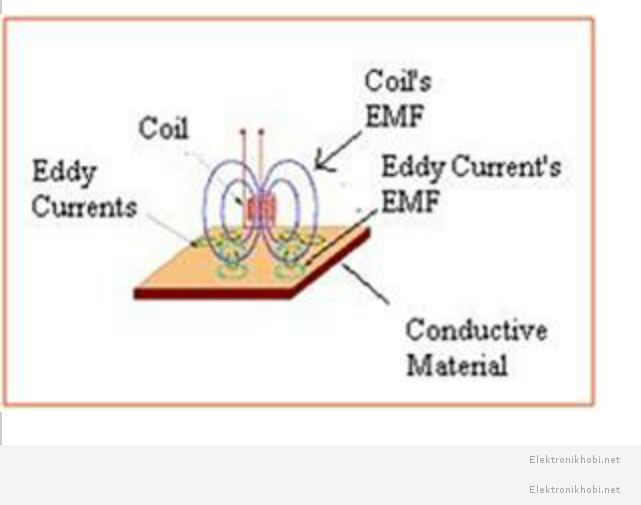
Bobini belirlemek için uygulanan alternatif akım birincil manyetik alanı indükler. Birincil manyetik alan,elektriksel iletken madde(bobin çevresinde bulunan) de girdap akımını indükler. Girdap akımları sırasıyla ikincil manyetik alanı indükler.İkincil manyetik alan bobin empedansında bir etkiye sahiptir.
İletken metalin varlığı veya yokluğu sırasıyla ikincil manyetik alanı ve bobin empedansını değiştirir. Bobin empadansındaki değişim elektriksel iletken cismin uzaklığını ölçmek için kullanılabilir.
Tanımlanmış bir ölçüm hedefi için boin empedansının değişimi uzaklığın bir fonksiyonudur. Bu nedenle uzaklık empedansın değişimi ölçülerek elde edilir.
5)Hall etkili Manyetik Pozisyon Sensörleri
Hall etkisi ilkesi, akım taşıyan 1 iletken manyetik alana yerleştirildiğinde manyetik alanın yönüne ve akımın akış yönüne dik 1 voltaj üretildiğini belirtir. Sabit akım yarı iletken metalin önce bir levhası boyunca geçtiğinde,eğer manyetik alan 0 ise çıkış kontaklarında potansiyel fark yoktur. Bununla birlikte,dik bir manyetik alan bulunduğunda, akan akım bozulur.Elektrik yoğunluğunun eşit olmayan dağılımı çıkış terminallerinde bir potansiyel fark yaratır.Bu voltaj Hall voltajı olarak adlandırılır. Eğer giriş akımı sabit tutulursa Hall voltajı direkt manyetik alanın gücü ile doğru orantılıdır.
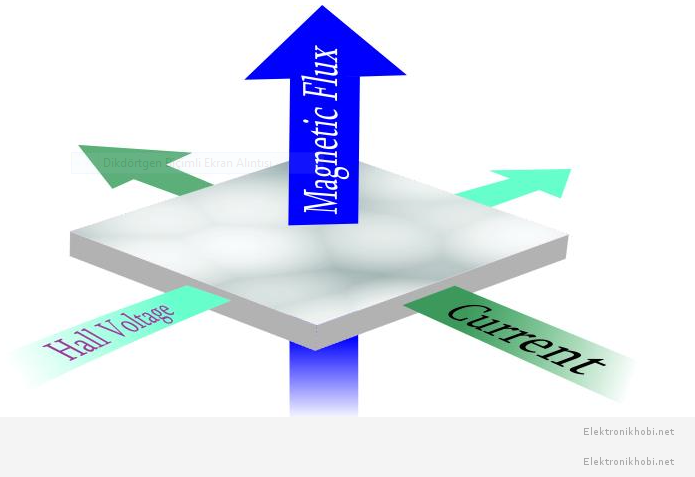
Hall etkisini kullanan pozisyon sensörlerinde,hareket eden parça magnet olarak adlandırılır. Bu nedenle, sensör Hall elemandan ve sensör miline yerleştirilen magnetten oluşmaktadır.Cismin ya da cismin parçasının hareketi ile magnet de hareket eder.Bu nedenle manyetik alan Hall elemanı ve Hall voltajı üzerindedir.Bu nedenle Hall voltajı hareket eden parçanın konumunun bir fonksiyonu olur. Ticari olarak temin edilebilen Hall elemanlar; dökme indiyum arsenit(InAs), ince film InAs, galyum Arsenit(GaAs), indiyum antimode(InSb) den yapılır.

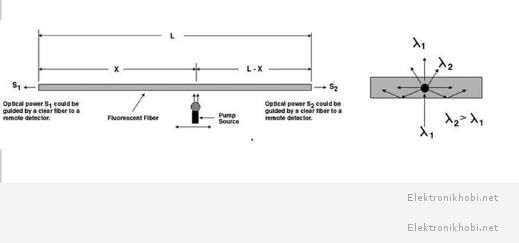
6- Fiber Optik Pozisyon Sensörleri
Fiber optikler bağışıklıklarının farklı avantajlarını elektromanyetik girişime sunar, potansiyel patlayıcı ortamlarda kıvılcım üretmezler. Potansiyel fiber optiklere dayalı olan pozisyon sensörler birkaç santimetreden birkaç metreye değişen yüksek çözünürlüğün çok önemli olmadığı ölçümlerde kullanılabilir.
Emilim tarafından takip edilen floresan bu sensörün merkezindedir.Pompa(tulumba) kaynak hareketi algılanacak olan cisim ya da cismin parçasına bağlıdır. Fiber floresandır ve fiberin uçlarına birer tane fotodedektör yerleştirilir.
Şerit ya da disk ışını kesen çok ince çizgilere sahiptir.Kesimlerin sayısı elektronik olarak hesaplanır ve pozisyon ya da açıyı temsil eder.
Sensor Seçimi
Seçenekler arttıkça, birini seçmek daha zor olur. Diğer sensör çeşitleri ile birlikte,pozisyon sensörleri uygulama gereksinimlerini yerine getirmek için ilk olarak seçilir.
Bir pozisyon sensörü seçilirken göz önünde bulundurulması gereken parametreler:
•Kontaklı/Kontaksız Çeşit
•Hareketi Doğrusal ya da Dönen
•Ölçüm Aralığı
•Kısıtlamalar
•Çevre
•Doğruluk
•Çözünürlül
•Yanıtlama Süresi
•Fiyat
•Sonuç
Potansiyometreler genellikle konum algılaması için en ucuz seçenektir,ama hareket eden hedef ile fiziksel temasa itiyaç duyar.Hall sensörler de uczudur ama on/off türünde uygulamalarda kullanılır.Bu nedenle detaylı konum bilgisinin gerekli olmadığı uygulamalar için etkilidir.Optik sensörler temassız tür olarak hızlı cevap verirler,sürtünme hesabına ihtiyaç duymazlar.Doğruluk hesaplama sayısına göre belirlenir.Fazla hesaplama doğruluk için daha iyidir.Bununla birlikte düzgün bir ayarlama ve sert ya da tozlu ortamdan koruma gereklidir.Diğerlerine nispeten daha pahalıdırlar.
Girdap akımına dayalı pozisyon sensörleri orta derece de fiyatlandırılmıştır,ama fazla detaylı pozisyon bilgisi ya da sensör ve hedef arasında büyük bir boşluk bulunması
durumunda tercih edilmez.Bunlar kirli çevreye tahammül edebilir ve sabit mekanik bir yapıya monta edildiğinde daha iyi olabilir.
LVDT ve RVDTler yüksek fiyatlandırılmıştır ama kirli ya da sert çevreye tahammül edebilirler.Yüksek doğruluk,yüksek duyarlılık ve yüksek hassasiyet sağlarlar.Endüstriyel ve havacılık alanlarında uygulama alanı bulabilirler.



{kind=link}