
Yaklaşık 2 saat kadar bir sürede yapabileceğiniz pek zorlanmayacağınız bir proje, malzemelerde genelde bulabileceğiniz kolay malzemeler. Karton bu projede çok işimize yarayacak. Gamepadten söküp kullanacağınız bir joystick ile de kontrol edebileceksiniz.
Proje de kullanacağımız mikroişlemci arduino
Eğer videosunu görmek isterseniz, buradan izleyebilirsiniz.
Malzemeler:
Oyuncak bir bebek
Karton
Teneke kutu
2 adet servo motor
Arduino uno
Bir adet joystick
Bir kaç adet vida (3 yeterli daha fazlada olabilir sağlamlaştırmak için)
Makas yapıştırıcı

Öncelikle kartonumuzdan 2 adet yuvarlak parça kesiyoruz. Bunun için teneke kutuyu kullanarak,teneke kola etrafından çiziyoruz.

Resimde ki gibi bir karton kesiyoruz.

Ardından kestiğimiz yuvarlakları yarı m daire olarak kesip resimde ki gibi yapıştırıyoruz.
Ardından yeni bir karton parçası kesip servo motorları resimde ki gibi bu karton parçasına geçiriyoruz. Sağlamlaştırmak için yapıştırıcı veya silikonda kullanabilirsiniz.
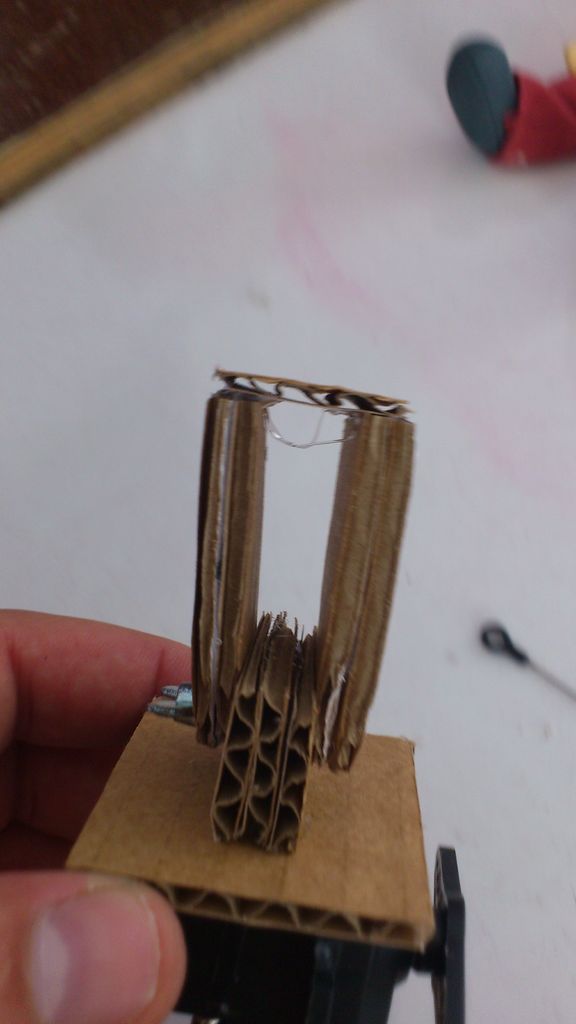
Ardından resimde ki gibi 3 adet karton parçası daha kesip servo motorların kenarına yapıştırdığımız kartona yapıştırıyoruz.

Şekilde ki gibi bir görünüm elde ediyoruz.
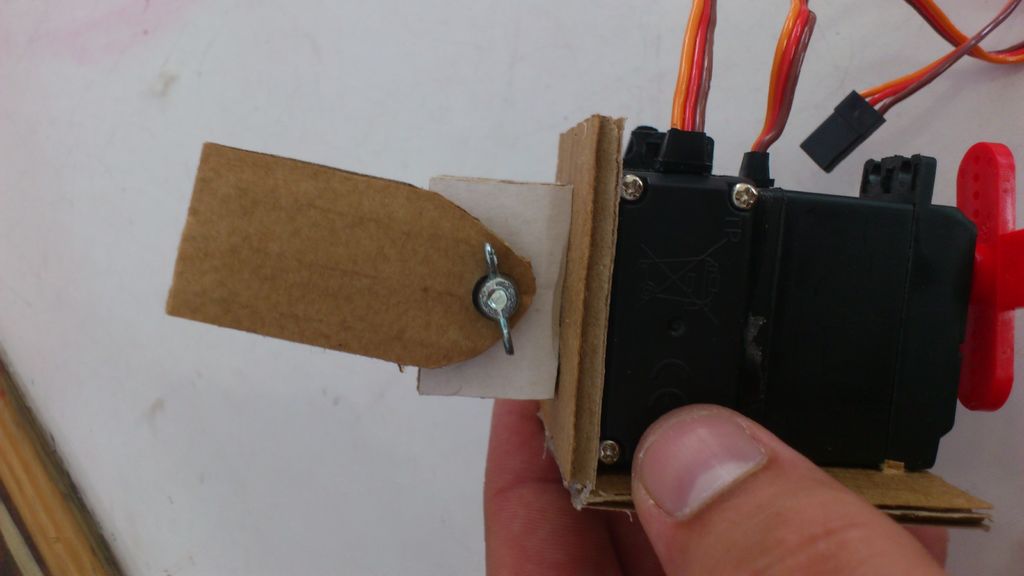
Daha sonra sol taraftaki gibi küçük kartonlar kesip bunları bir üstteki yapıştırdığımız kartona vidalıyoruz. Vidayı çok fazla sıkmayın kartonlar parçalanmasınç
Bu şekilde bir görünüm olacak.

Daha sonra bu yaptığımız kısmı teneke kutu yardımıyla ilk başta yaptığımız yarım daire şeklinde ki kartona yapıştırıyoruz. İsterseniz vidada kullanabilirsiniz. Ayrıca bu resimde sağ tarafta bir kol görüyorsunuz. Bu kolların yerine farklı şeylerde kullanabilirsiniz. Bulabilirseniz bu kollardan alın.
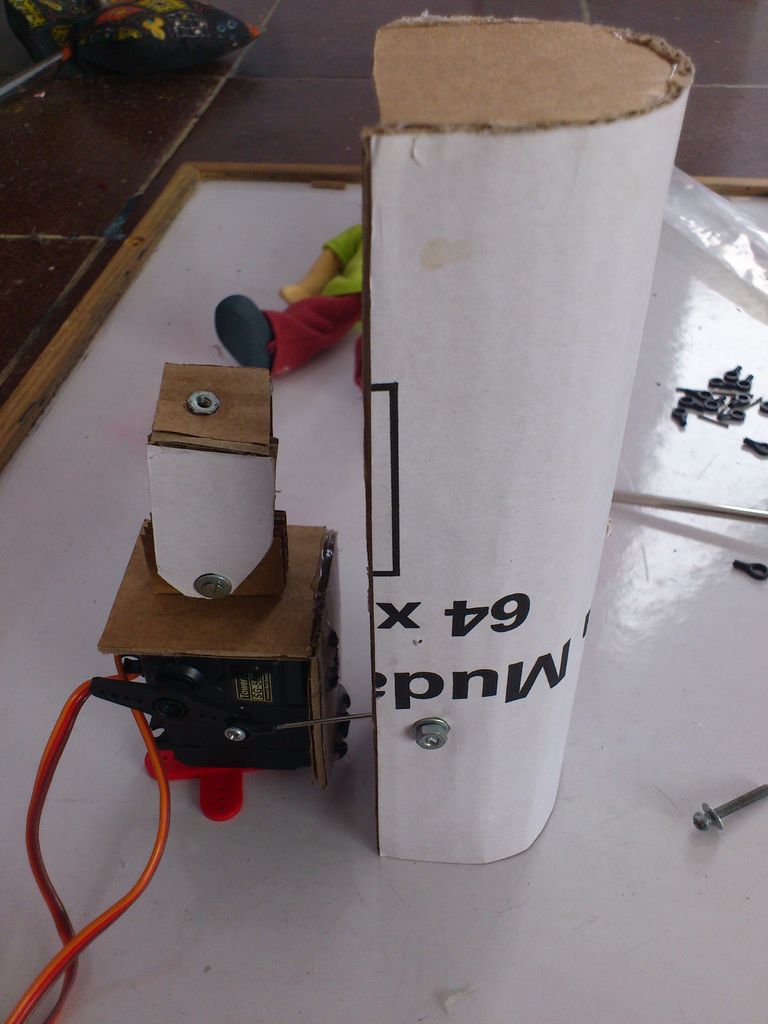
O gördüğünüz kolu yan tarafından servo motorla bağlantı kurmak amacıyla koyuyoruz. Servo motor döndüğünde hareketimizi sağlayacak.

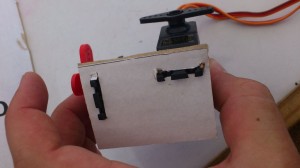
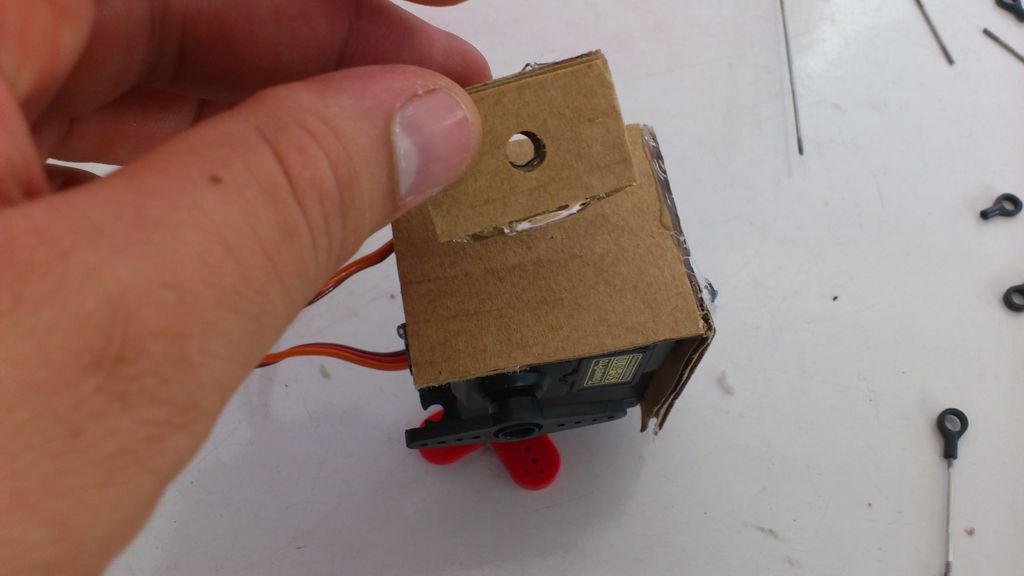
Ardından yeni bir karton keserek ortasına şekilde ki gibi bir delik açıyoruz. Bu diğer servo motorumuzu yerleştirmek için gerekli.

Daha sonra son görünümümüz bu şekilde oluyor. İsterseniz farklı eklemeler boyamalar da yaparak güzellik katabilirsiniz.

Bu şekilde bir kola kapağını da takarak güzel bir görünüm sağlayabilirsiniz.
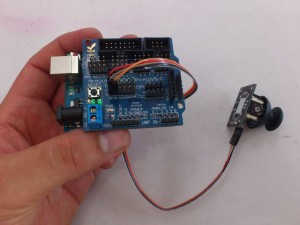
Ardından joystik ile bağlantımızı sağlıyoruz.

Servo motor bağlantılarını da yapıyoruz.
Eğer joystick gamepadden söküp uğraşmak istemezseniz. Hazır joystickler alabilirsiniz. 5 Dolara yakın bir fiyatı var. Joystick shield şeklinde arama yapabilirsiniz.
Örnek olması açısından.
http://www.ebay.com/itm/JoyStick-Breakout-Module-Sensor-Shield-For-Robot-Arduino-UNO-2560-R3-STM32-A072-/400373601206?pt=LH_DefaultDomain_0&hash=item5d382053b6
Yazılım Kodlarını ekleyelim.
#include <Servo.h> // incluindo a biblioteca dos servos
Servo SRx;
Servo SRy;
const int VRx = A0;
const int VRy = A1;
int sensorVRx = 0;
int sensorVRy = 0;
int outputVRx = 0;
int outputVRy = 0;
long tempo_anterior= 0;
long intervalo= 100; //milisegundos
unsigned long tempo_atual;
void setup()
{
Serial.begin(9600);
SRx.attach(9);
SRy.attach(10);
}
void loop()
{
tempo_atual = millis();// o tempo atual é igual ao tempo de funcionamento do uC
sensorVRx = analogRead(VRx);
sensorVRy = analogRead(VRy);
outputVRx = map(sensorVRx, 0, 1023, 0, 180);
outputVRy = map(sensorVRy, 0, 1023, 0, 180);
if(tempo_atual – tempo_anterior > intervalo)// se o tempo atual menos o tempo anterior for maior que o intervalo com que eu quero fazer minha acao
{
tempo_anterior = tempo_atual;//tempo anterior recebe o tempo atual
Serial.print(outputVRx);
Serial.print(“,”);
Serial.print(outputVRy);
Serial.print(“,”);
Serial.println(“”);
}
SRx.write(outputVRx);
SRy.write(outputVRy);
delay(2);
}
Eğer takıldığınız yardımcı olmamızı istediğiniz konu olursa sorabilirsiniz.



{kind=link}